Robotnik SUMMIT XL Bedienungsanleitung

SUMMITXL
MOBILEPLATFORM
SYSTEMELEMENTS
MAINTENANCEMANUAL
RBTNKDOC160609A
RobotnikAutomationSLL,Spain
RBTNKDOC160609A
SystemElementsandMaintenanceManual
SUMMITXLmobileplatform
Contents
1.Introduction
2.ExternalElements
2.1Motorwheels
2.2MotorDrivers
2.3ControlPanel
2.4AxisCamera(optional)
2.5HokuyoLaserRangeFinder(optional)
3.InternalElements
3.1EmbeddedPC
3.2WirelessRouter
3.3DC/DC12VDC&5VDC
3.4Terminals&Fuses
3.4.1Initialsetupofthefuses
3.5FPUPixhawk(optional)
4.ManualControls
4.1DualShockcontroller
5.BatteryandCharger
5.1LiFePO4batterypack
5.1.1LiFePO4Cell
5.1.2Protectioncircuitmodule
5.2LiFePO4SmartCharger
6.CommunicationDiagram
7.MaintenanceSummary
8.BasicDrawings
2

RBTNKDOC160609A
SystemElementsandMaintenanceManual
SUMMITXLmobileplatform
1.Introduction
This Manual describes the main parts of the SUMMIT XL mobile robot, as well as how
are they assembled. Every main piece includes a little description of the mechanical
component that composes it, emphasizing the elements that need a special periodical
controlandmaintenance.
The location and maintenance of other non mechanical components is also described
below.
Finally, a summary of the basic drawings of the vehicle and the main components has
beenincluded.
2.ExternalElements
Thenextfiguresshowthemainpartsoftherobot:
Figure1–MainpartsofSUMMITXLrobot
3

RBTNKDOC160609A
SystemElementsandMaintenanceManual
SUMMITXLmobileplatform
Figure2–MainpartsofSUMMITXLrobot,rearview
Themainpartsthatformtherobotare:
Housing:
It is made of fiber glass and holds the upper and rear covers. The
electricalcomponentsareplacedinside.Onlythebatteryisoutside.
Upper Covers: Can be removed to access to the interior of the robot where some of
thecontrolcomponentslikethecontrolcomputerareplaced.
RearCover:Holdsthecontrolpanel,buttonsandthewirelessantennas.
Motor wheels: Four motor wheels 250W brushless motor with Hall Effect sensor
andareductiongearboxinsidethealuminumwheel.
Battery:24VLiFePO4battery(8x3.2V15Ahcells).
Shocks:Fourstrongshockabsorbers.
(optional)PTZcameras
protectedbyreplaceabledomesandsensors.
Emergency Stop, Front and Rear Bumper disable the drivers stopping the robot if
activated.Caution:thereisnorearmbutton.
4

RBTNKDOC160609A
SystemElementsandMaintenanceManual
SUMMITXLmobileplatform
2.1Motorwheels
Figure3–Motorwheels
The robot has 4 motor wheels with the same configuration. Each wheel is composed by
a motor block and a detachable wheel. The motor block has a 250W 8 poles brushless
motor with Hall Effect sensor and a reduction gear box, all hold by an aluminum cover.
These kinds of motors have a much longer life expectancy and a higher efficiency than
brushedmotors.
This kind of rubber tire is specially made for Robotnik, so contact us if you need to
replace them. It has a width of 145mm and a diameter of 235mm. The motor block
diameter is 100mm. It is recommended that no weight rests on the wheels for a very
longtimewhenstoppedtoavoidflattening.
The cable must be kept in good condition, and protected if the external cover is
damaged. There are three 24V power wires, two 5VDC power and three Hall Effect
signals.Iftheyareshortcircuit,themotorandthedrivercanbedamaged.
5

RBTNKDOC160609A
SystemElementsandMaintenanceManual
SUMMITXLmobileplatform
2.2MotorDrivers
Figure4–MotorDriver
The motor drivers are four DZCANTE 020L080 with a MC1DZC connection board on
top.
The drivers are programmed at Robotnik with specific a settings for each motor. The
serial identifier is the default one (63), but each driver has its own CAN bus identifier (1,
2, 3 and 4). DO NOT change them from one motor to another. To reduce power
consumption,ifthevelocityiszero,onlytherearwheelsbrake,thefrontonesarefree.
The computer sends CAN messages to move the robot, and they are different from the
left side (1 & 2) and right side (3 & 4). Driver 1 is the only one with the Can bus resistor
installed.
There are several analog and digital input/outputs available in each driver, check driver
datasheetformoreinformation.
6
RBTNKDOC160609A
SystemElementsandMaintenanceManual
SUMMITXLmobileplatform
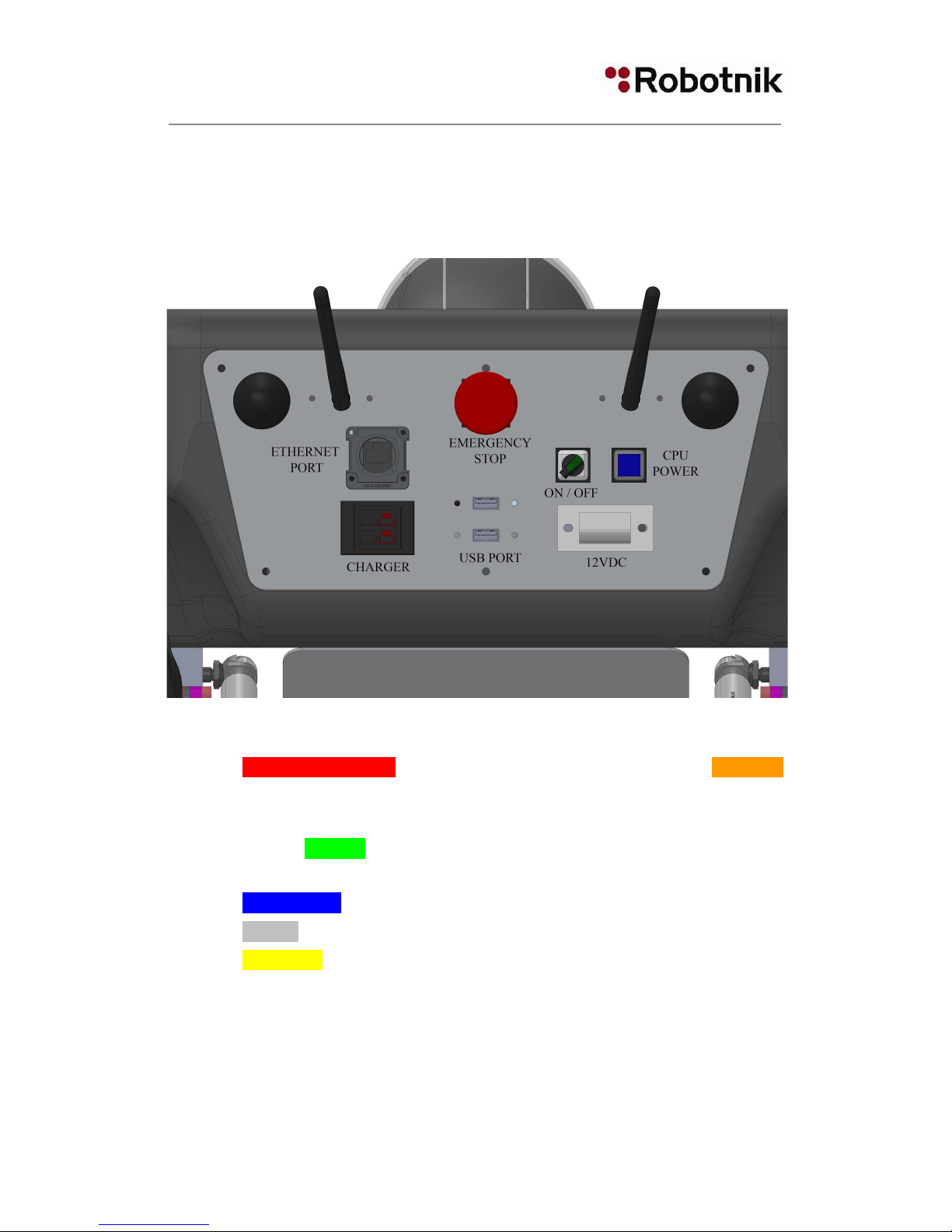
2.3ControlPanel
Therobotpresentsinitsbackcoverseveralbuttons,indicatorsandconnectors:
Figure5Controlpanel
EMERGENCY STOP will disable the drivers and stop the robot. CAUTION
there is no rearm button, so the robot will keep moving when the Emergency
Stopisreleased.
General ON/OFF key (S1): cuts the power of the whole robot. It has a green
lightindicator.
CPUPOWERblueindicator/switch:turnsonandoffthecomputer
12VDC:intendedtopowerexternaldevicesandprotectedwithfuse
CHARGER:toconnecttheprovidedbatterycharger
TwofreeUSB2.0ports
Ethernetport(bydefaultaWANport)
WiFiantennas
7

RBTNKDOC160609A
SystemElementsandMaintenanceManual
SUMMITXLmobileplatform
2.4AxisCamera(optional)
Figure6–AxisPTZcamera
CAMERA
AXISP5514PTZDomeNetworkCamera
Imagesensor
1/2.3”progressivescanCMOS
Lens
3.8–42.9mm,F1.4–2.1Horizontalangleofview:59.2°–5.2°
Autofocus,Autoiris
Minimum
illumination
Color:0.7luxat30IREF1.4
B/W:0.08luxat30IREF1.4
Pan/tilt/zoom
Eflip,Autoflip,100presetpositionsPan:360°(withautoflip),
1.8°–100°/sTilt:180°,1.8°–100°/s12xopticalzoom,10xdigital
zoom,total120xzoomLimitedguardtour,Controlqueue
VideoResolution
1280x720to320x180
Compression
H.264(MPEG4Part10/AVC)Baseline,MainandHighProfiles
MotionJPEG
Connectors
RJ4510BASET/100BASETXPoEMulticonnector(cablenot
included)forAC/DCpower,4configurablealarminputs/outputs,
micin,linemonoinput,linemonooutputtoactivespeaker.
Storage
SupportforSD/SDHC/SDXCcard(notincluded)Supportfor
recordingtodedicatednetworkattachedstorage(NAS)
8

RBTNKDOC160609A
SystemElementsandMaintenanceManual
SUMMITXLmobileplatform
Table1–AXISP5514features
Thecameraispoweredfromthe12VDCDC/DCbutcandirectlypoweredwithanAxis
HighPoweroverEthernet(HighPoE)midspan,allowingAxisnetworkvideoproducts
toreceivedataandpoweroverthesameEthernetcable.
2.5HokuyoLaserRangeFinder(optional)
The robot can be equipped with several models with our specific adaptors. Below you
canseethelaserrangefindersusuallymounted.
URG04LXUG01
● Lightweight:160g
● WideAngle:240º
● Range:5600mm.
● Accuracy(±30mm).*
● Distanceandangledataoutputwithhigh
angularresolution(0.352°).
● Lowpowerconsumption:2.5W
UTM30LX
● OutdoorEnvironment
● Lightweight:370g
● WideAngle:270°
● LongDetectionrange:30m
● Compact:W60xD60xH87mm
UST10LX
● Supplyvoltage10~30V
● Measurementdistance10m/20m
● Fieldofview270°
● InterfaceEthernet
Table2–LaserRangeFinders
9

RBTNKDOC160609A
SystemElementsandMaintenanceManual
SUMMITXLmobileplatform
3.InternalElements
The following figure shows other nonmechanical components to be in consideration for
maintenancetasks.
Figure7–SummitXLinsideview
10
Inhaltsverzeichnis
Andere Robotnik Robotik Handbücher




Beliebte Robotik Handbücher anderer Marken

STEMCenter USA
STEMCenter USA Pi-Bot v2.00 Bedienungsanleitung

SunFounder
SunFounder PiDog Bedienungsanleitung

Universal Robots
Universal Robots UR5 Bedienungsanleitung

Universal Robots
Universal Robots E Series Bedienungsanleitung

YASKAWA
YASKAWA MOTOMAN-MPL80 II Bedienungsanleitung

EFORT
EFORT ECR5 Gebrauchsanweisung











